신문은 선생님
[재미있는 과학] 소금쟁이 따라 만든 초소형 로봇, 표면장력 이용해 움직여
입력 : 2025.09.23 03:30
표면장력 원리와 소금쟁이
-
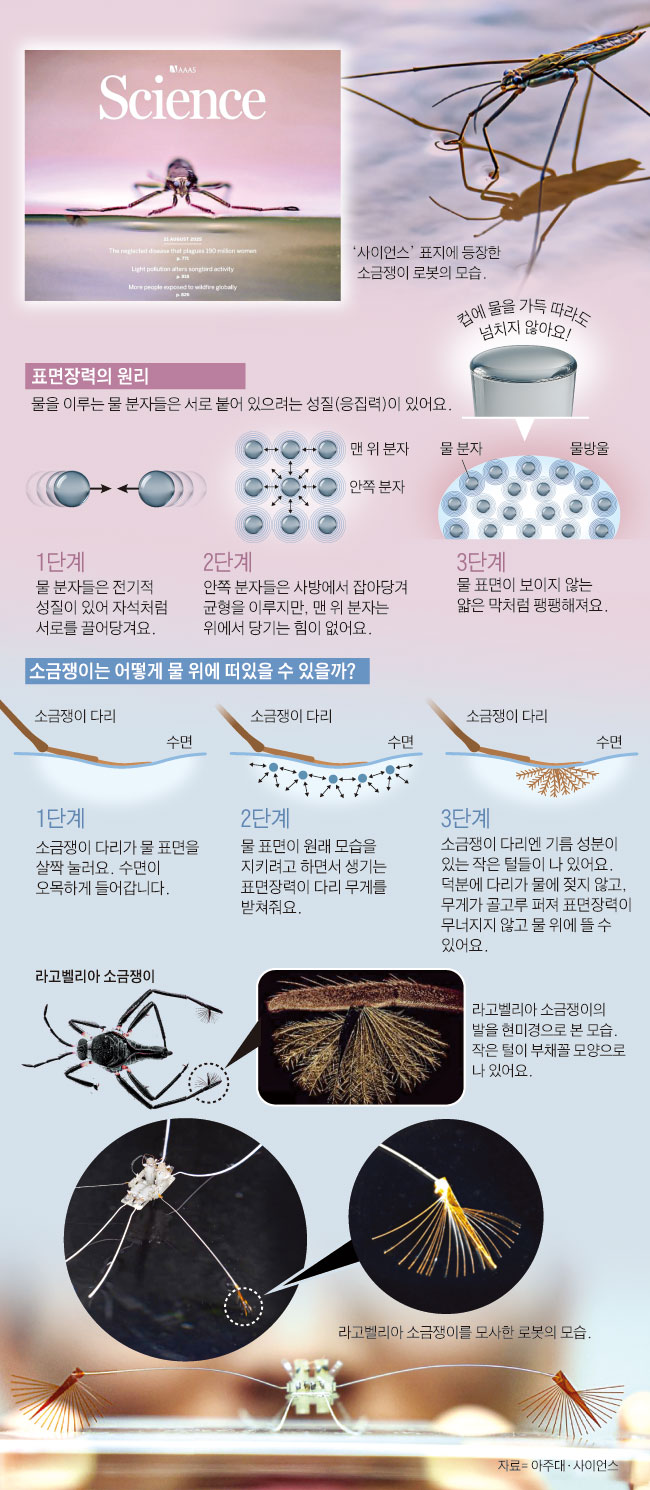
- ▲ /그래픽=유재일
이는 물 분자가 서로를 잡아당겨 만들어내는 표면장력 덕분인데요. 최근 과학자들은 소금쟁이가 움직이는 원리를 이용해 '소금쟁이 로봇'을 개발했다고 해요.
이런 로봇은 가벼운 무게로 물 위를 이동할 수 있어, 수질 조사나 재난 현장 탐색처럼 사람이 직접 접근하기 어려운 곳에서 유용하게 활용될 수 있다고 합니다. 오늘은 표면장력과 소금쟁이 로봇의 원리에 대해 알아볼게요.
소금쟁이의 비결은 표면장력
소금쟁이가 물 위를 떠다닐 수 있는 비결은 바로 표면장력입니다. 표면장력이란 액체의 표면에서 분자들이 서로 끌어당기면서, 표면적을 가능한 한 줄이려고 하는 힘을 말합니다. 물이 가득 찬 컵에 스포이트로 물을 조금씩 떨어뜨리면 곧 넘칠 것 같지만 실제로는 컵 가장자리 위로 물이 둥글게 솟아오르는 것을 볼 수 있지요. 이는 표면장력이 물을 안쪽으로 당겨 표면을 팽팽하게 유지하기 때문이랍니다.
물 분자는 내부에서는 사방에서 균형 있게 당겨지지만, 물 표면에서는 위쪽(공기 방향)에서 잡아당기는 힘이 없기 때문에 옆이나 아래로만 끌립니다.
그 결과 물 표면은 안쪽으로 당겨지며 마치 얇은 막처럼 단단해져요. 동전이나 바늘을 조심스럽게 올렸을 때 잠시 뜨는 것도 바로 이 표면장력 덕분이지요. 표면의 얇은 막이 가벼운 물체의 무게를 분산시켜 버티는 겁니다.
소금쟁이의 다리 역시 표면장력의 영향을 받습니다. 소금쟁이가 물 위에 올라서면 다리가 표면을 눌러 수면이 살짝 오목하게 꺼지고, 표면적이 늘어납니다. 이때 물은 표면적을 줄이려는 방향으로 표면장력이 작용하죠. 누르는 힘과 밀어내는 힘이 균형을 이루어 소금쟁이는 물에 가라앉지 않고 뜨는 거예요.
소금쟁이의 발에도 다른 비결이 숨어 있어요. 소금쟁이 발에는 미세한 털이 촘촘히 나 있어 물과 직접 닿는 것을 막아 줍니다. 털에는 기름과 같은 소수성(물을 밀어내는) 성분이 묻어 있어 물이 스며들지 않습니다. 게다가 털과 털 사이엔 작은 공기층이 있어 다리가 물에 젖지 않도록 해주죠. 이런 구조 덕분에 소금쟁이는 체중을 고르게 분산하며 물 위에 안정적으로 떠 있을 수 있는 거예요.
소금쟁이 모사한 '라고봇'의 등장
표면장력 원리를 이용한다면, 소금쟁이처럼 물 위에서 움직이는 로봇을 만들 수 있겠지요. 실제로 한국의 과학자들이 소금쟁이를 닮은 로봇을 만드는 데 성공해 최근 최고 권위의 과학 국제 학술지 '사이언스'에 발표했답니다.
아주대 고제성 교수가 이끈 공동 연구팀은 '라고벨리아'라는 소금쟁이 종에 주목했어요. 라고벨리아의 다리를 자세히 보면, 빽빽한 털이 부채처럼 퍼져 있습니다. 물에 닿는 순간 0.01초 만에 털이 활짝 펴지고, 물 밖으로 나오면 다시 오므라들지요. 털이 부채처럼 활짝 펴지면, 물에 닿는 부분이 넓어지고 그러면 같은 힘으로도 더 많은 물을 밀어내며 힘차게 앞으로 나아갈 수 있어요. 또 순식간에 털이 접히기 때문에 방향을 바꾸거나 도망칠 때 저항을 줄이며 재빨리 움직일 수도 있지요.
로봇 개발의 핵심도 바로 이 털을 재현하는 것이었습니다. 연구진은 가볍고 유연한 특성을 가진 플라스틱 소재 '폴리이미드'를 이용해 아주 가는 인공 털을 제작한 뒤, 이를 초소형 로봇의 발에 부착했습니다. 이렇게 해서 라고벨리아 소금쟁이의 발 구조를 모사한 '라고봇'이 완성된 것입니다.
라고봇의 무게는 0.23g에 불과하지만 물 위를 빠르게 이동할 수 있다고 해요. 게다가 모터 같은 기계 장치 없이 표면장력과 탄성력을 이용해 움직일 수 있다고 합니다. 앞으로 라고봇은 강이나 호수의 수질을 조사하거나, 사람이 직접 들어가기 어려운 물 위에서 탐사를 수행하는 데 활용될 수 있다고 해요.
소금쟁이처럼 폴짝 점프하는 로봇
과거에도 소금쟁이를 모사한 로봇이 개발된 적이 있었어요. 서울대 조규진 교수팀이 개발한 소금쟁이 로봇이지요.
연구진은 소금쟁이의 점프 과정을 초고속 카메라로 분석했습니다. 관찰 결과, 소금쟁이는 도약 직전에 네 다리를 안쪽으로 오므려 힘을 모으는 것을 알 수 있었는데요. 이때도 표면장력을 깨뜨리지 않을 정도의 힘만 가한다는 사실이 밝혀졌습니다. 이 동작은 점프를 위한 힘을 모으는 데 도움이 돼요. 마치 사람이 도움닫기 후 땅을 힘껏 밀어내듯, 표면장력의 반발력을 활용해 도약하는 것이지요.
연구팀은 소금쟁이처럼 가늘고 긴 다리 네 개를 연결해, 무게가 약 68㎎에 불과한 초소형 로봇을 만들었죠. 소금쟁이 움직임을 모방해 구동 장치의 추력이 물의 표면장력을 넘어가지 않도록 설계했습니다. 이를 이용해 로봇은 다리를 움직이며 물에 발이 빠지지 않은 채 도약할 수 있었습니다. 그 결과 물에서도 지상에서 뛰는 것처럼 높게 점프하는 데 성공했다고 해요.