신문은 선생님
[재미있는 과학] 브레이크 밟듯 속도 줄이고… '젓가락 로봇팔'로 붙잡았죠
입력 : 2024.12.10 03:30
스타십
-
- ▲ /그래픽=진봉기
마치 공상과학 영화의 한 장면 같았던 로켓 회수는 어떻게 가능했을까요? 오늘은 스타십이 무엇인지, 또 어떤 기술로 이 로켓을 발사탑에 다시 안착시켰는지 알아볼게요.
인류가 만든 가장 힘센 발사체
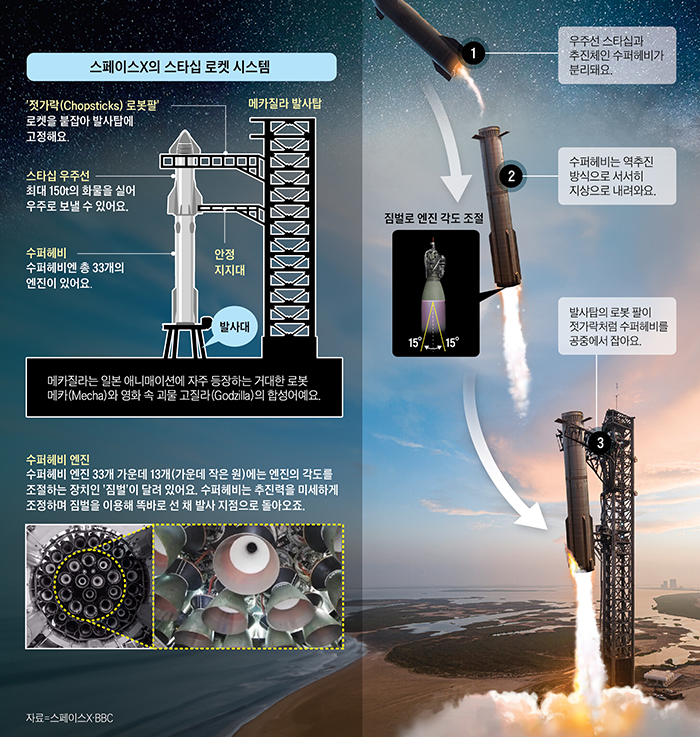
스타십은 스페이스X가 우주를 탐사하기 위해 개발 중인 우주 발사체 시스템이에요. 스타십은 1단 추진 로켓인 '수퍼헤비'와 2단 로켓이자 세계 최대 우주선인 '스타십'으로 구성돼 있죠. 시스템과 우주선 이름 모두 스타십이랍니다. 1단과 2단을 합친 총 길이는 약 120m로, 40층 아파트 높이와 비슷해요. 1단과 2단 모두 발사 후 회수해서 재사용할 수 있는 구조로 제작했답니다.
수퍼헤비는 지금까지 인류가 만든 로켓 중에 가장 커요. 추력(사물을 위로 밀어 올리는 힘) 역시 가장 강하죠. 1단에 33개, 2단엔 6개의 엔진이 장착돼 있는데요. 1단에 장착된 엔진들이 만들어내는 힘은 약 7700t이라고 해요. 이는 보잉747 항공기 63대가 내는 힘과 비슷합니다.
스타십은 발사체에 물체를 실을 수 있는 최대 탑재 중량이 최고예요. 화물을 150t까지 실을 수 있어요. 미 항공우주국(NASA)이 보유한 것 중 가장 힘이 센 발사체 '스페이스 론치 시스템(SLS)'은 약 95t을 쏘아 올릴 수 있거든요. 우리나라가 개발한 발사체 누리호의 탑재 중량은 1.9t이랍니다. 스타십에는 사람 100명이 탑승할 수 있어요.
'젓가락 로봇팔'이 로켓 회수
지난 10월 미국 텍사스 보카치카 해변 발사장에서 스타십이 발사됐어요. 스타십의 5차 시험 비행이었죠. 거대한 화염을 내뿜으며 하늘로 치솟은 스타십은 발사 3분 뒤 1단 로켓 수퍼헤비와 2단 우주선이 분리됐어요.
수퍼헤비는 이륙 후 7분 만에 다시 발사탑으로 접근했어요. 수퍼헤비가 똑바로 선 채 천천히 지상으로 내려오자, 발사탑에 설치된 로봇 팔이 수퍼헤비의 윗부분을 젓가락으로 집듯 붙잡아 발사탑에 고정시켰어요. 마치 집 주차장에서 출발한 자동차가 돌아와 같은 자리에 주차된 것과 같았죠.
로봇 팔을 장착한 거대한 발사탑 이름은 '메카질라'라고 해요. 스페이스X의 CEO 일론 머스크가 지은 이름인데, 일본 애니메이션에 자주 나오는 거대한 로봇 '메카'와 영화 속 괴물 '고질라'의 합성어예요. 로봇 팔에는 '젓가락'이라는 이름을 붙였죠. 젓가락 모양 로봇 팔을 이용해 추진체 회수를 시도한 건 5차 시험 때가 처음이에요. 지금껏 어느 국가도 시도한 적 없는 로켓 회수 방식이랍니다.
이전까지 우주 로켓은 일회용으로 사용하거나, 안전 문제로 인해 멀리 떨어진 바다에 착륙시킨 뒤 회수했어요. 이 때문에 로켓을 재사용하려면 다시 발사탑으로 가져와야 해서 시간과 비용이 많이 들었죠. 해상에서 회수한 발사체를 정비한 뒤 다시 발사하려면 보통 한 달 이상 시간이 필요하거든요. 착륙 시 충격으로 로켓이 훼손되기도 했고요.
하지만 로봇 팔은 로켓이 훼손되는 것을 막을 수 있어 연료를 다시 채워넣으면 착륙 후 몇 시간 안에 재발사가 가능하다고 해요. 우주 탐사에 들어가는 비용과 시간을 크게 줄일 수 있는 거죠.
역추진 방식으로 속도 조절했어요
여기엔 어떤 기술이 들어갈까요? 핵심은 로켓 속도를 조절하는 '역추진' 기술이에요. 이는 수퍼헤비의 엔진 출력을 정밀하게 조절해, 마치 자동차 브레이크를 서서히 나눠 밟듯 추진체의 속도를 줄여 '제로(0)'에 가깝게 만드는 기술이에요. 중력을 받아 떨어지는 로켓 엔진을 재점화해 낙하 속도를 늦추는 거죠.
역추진 기술을 구현하기 위해 수퍼헤비의 엔진 33개 가운데 13개에는 수평 유지 장치인 '짐벌'이 달렸어요. 이 짐벌은 엔진 방향을 최대 15도까지 움직일 수 있어요. 수퍼헤비가 발사 지점으로 내려올 때 각도를 조정해 방향을 맞추고, 추진력을 조절해 속도를 제어하죠. 길쭉하게 생긴 수퍼헤비는 작은 변수에도 무게중심이 쉽게 변해요. 그럼에도 불구하고 발사할 때처럼 똑바로 다시 돌아올 수 있었던 것은 발사체 무게와 발사체에 가해지는 중력을 동시에 계산하는 정교한 기술 덕분이에요. 그리고 수퍼헤비는 위치정보시스템(GPS)의 도움을 받아 정확한 착륙 장소 정보를 얻어 로봇 팔로 접근하죠.
그런데 스타십은 왜 이렇게 어려운 역추진 기술을 사용할까요? 보통 우주왕복선의 경우 발사될 때는 로켓에 실려 올라가고 착륙할 때는 비행기처럼 지표면을 활주하다 멈춰요. 하지만 화성 같은 행성엔 마땅한 활주로가 없죠. 그래서 스스로 속도와 중심을 잡으면서 내려오는 역추진 방식을 사용하는 거예요.
과학자들은 로켓 회수에 성공한 로봇 팔 기술이 앞으로의 우주 탐사에 큰 도움을 줄 것이라고 평가해요. 스페이스X는 계속 이어질 시험 비행에서 1단과 2단 모두 재사용하는 기술을 보여줄 거래요.
이번 회수 기술이 성공하면서 인류가 달과 화성을 여행할 수 있는 가능성도 더 커졌습니다. NASA는 유인 달 탐사 프로그램인 '아르테미스 계획'을 진행 중이에요. 2~3년 뒤엔 우주인을 달에 보낼 예정인데요. 이때 스타십 우주선을 달 착륙선으로 활용할 계획입니다.